導語
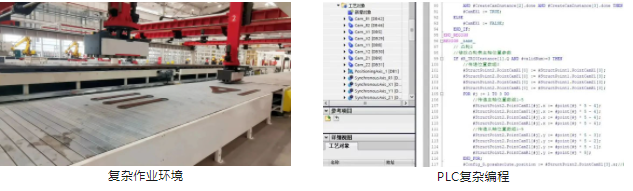
隨著智慧工廠的廣泛建設,桁架機器人在制造、物流等環節中的作用日益凸顯。當前大部分工廠仍采用傳統PLC(可編程邏輯控制器)來控制桁架,僅能實現簡單場景下的桁架運動控制功能,難以支持復雜作業環境以及動態任務場景下多臂桁架機器人的靈活高效控制。且PLC編程開發周期長、成本高、調試難,無法實現快速交付。
隨著智慧工廠的廣泛建設,桁架機器人在制造、物流等環節中的作用日益凸顯。當前大部分工廠仍采用傳統PLC(可編程邏輯控制器)來控制桁架,僅能實現簡單場景下的桁架運動控制功能,難以支持復雜作業環境以及動態任務場景下多臂桁架機器人的靈活高效控制。且PLC編程開發周期長、成本高、調試難,無法實現快速交付。
針對以上亟待解決的難點,視比特機器人推出了國內首款多臂智能桁架機器人控制器——SpeedTruss,以最優運動規劃突破傳統桁架自由度限制,實現了多臂共軸桁架機器人在復雜環境、復雜任務下的自動規劃、主動避障、敏捷執行,適應全場景柔性生產需求;同時支持低代碼靈活開發,極大地簡化了開發流程,大幅縮短了投產周期,為工廠智能化水平和生產效率的提升帶來質的飛躍。

SpeedTruss VS 傳統PLC
1.PLC在控制桁架柔性作業時遇到的挑戰
1.PLC在控制桁架柔性作業時遇到的挑戰
1)在面對動態任務(如多SKU物品分揀)或場景變化(如遇到障礙物)時,桁架運動柔性程度低,需修改程序或重新調試來適配現場需求,開發及調試周期長、成本高。
2)多臂協同作業時,機械臂越多,控制難度越大,易發生不同臂相互干涉、沖突(如碰撞)等問題,從而影響生產效率,需人為編寫復雜的程序來調整。
3)桁架控制過程缺乏直觀的可視化工具,操作及調試難度大。
2.SpeedTruss智能桁架控制器的優勢

1)搭載自研最優運動規劃技術,實現桁架自動控制與智能協調,免示教、自動規劃、主動避障,可勝任各種高難度空間作業,無需重新編程。
2)多臂共軸無碰運動規劃,實現多臂桁架機器人在共享工作空間內高速無碰、靈敏作業,無需人為干涉。
3)在線優化任務分配,實時調整任務執行順序,實現更高效作業。
4)三維可視化界面,生產信息實時監控,所見即所得。
5)開發靈活、操作簡便,省時省心,用戶使用更便捷。
SpeedTruss全解讀

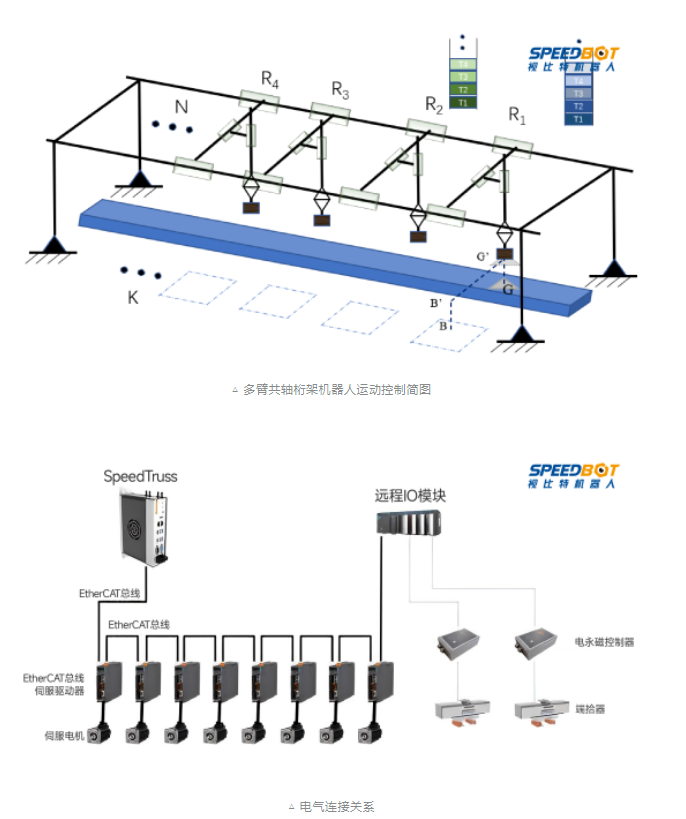
SpeedTruss智能桁架控制器主要用于多臂共軸桁架機器人(N≥1)的運動控制,運用自主研發的桁架運動規劃、多臂協同運動控制、無碰運動協調等算法技術,為智能產線提供靈活、精準、高效的多臂桁架運動控制方案。用戶只需調用控制器提供的高級任務指令接口(如將某臺桁架臂移動到目標位置K),即可實現對桁架機器人運動軌跡的自動控制與協調,保障各個桁架臂高效無碰協同運動,有效提升生產效率。
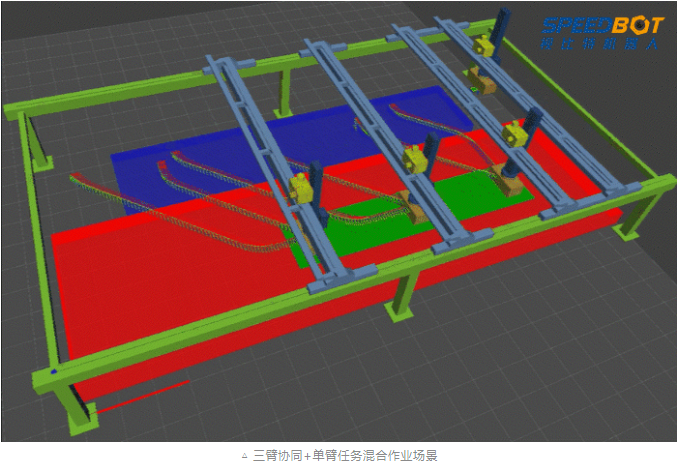
1.最優運動規劃,無需人為示教
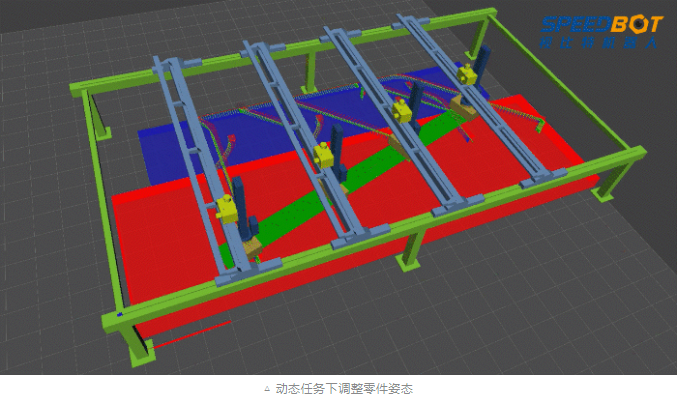
SpeedTruss智能桁架控制器建立了軌跡規劃、多臂協同、無碰運動等多種算法相結合的桁架臂最優運動規劃方法,可進行單臂任務、多臂協作任務以及單臂與多臂任務混合場景的桁架運動軌跡的規劃。
·針對動態任務場景,以基于幾何約束的軌跡規劃算法,有效解決了因任務變化(如桁架搬運場景中抓取物體尺寸的變化)導致的不同臂運動干涉問題,保障設備安全作業。
·針對多臂協同作業場景,自研多機無碰路徑規劃與協調算法,通過精確計算桁架機器人各個臂的無碰運動軌跡,并最大化地調度各個桁架臂同時運動,實現多臂桁架高速、靈活作業。
·針對高速重載場景,自動計算桁架臂各個關節平滑運動的速度曲線,實現桁架自身速度和加速度的精準控制,保障桁架平穩高速運動。

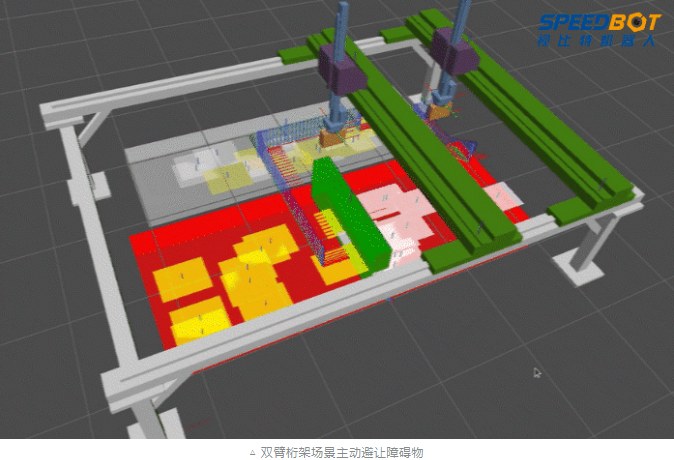
·針對存在障礙物的作業場景,自動規劃桁架臂避障運動路徑,無需人為示教避讓點,輕松實現桁架機器人主動避障。
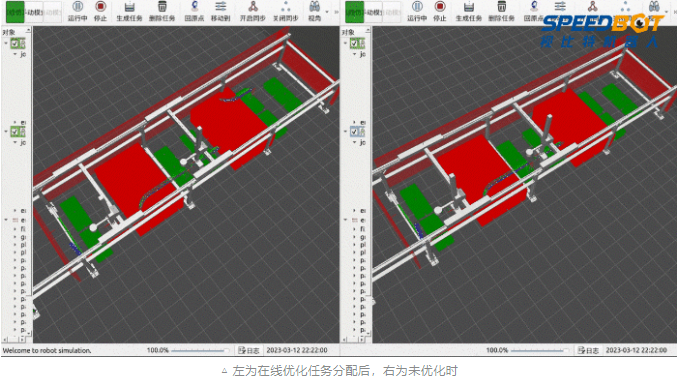
2.在線優化任務分配,整體效率提升20%~35%
在多任務場景下,桁架機器人存在多個共軸的機械臂,不同臂在工作空間內的任務時序直接影響整體作業效率。SpeedTruss智能桁架控制器建立了基于時空約束的最優任務分配模型,最大限度地提高工作效率。
· 通過AI強化學習實現在線優化任務分配,智能調度復雜空間下的任務分派,并自動選擇最優桁架臂進行任務執行。
·通過在線優化與決策,實時調整任務執行順序,相較PLC等傳統控制器,SpeedTruss將桁架系統的整體作業效率提升了20%~35%。
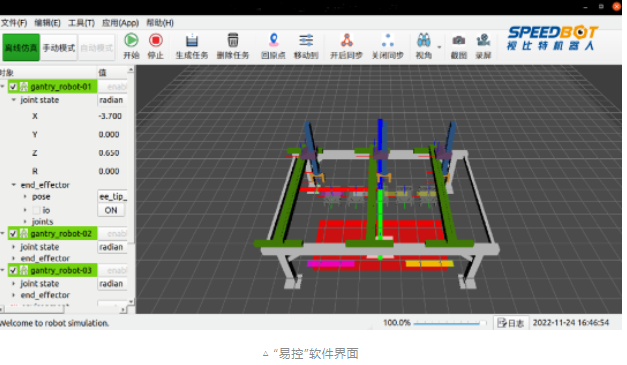
3.三維可視化,所見即所得
SpeedTruss智能桁架控制器軟件系統——“易控”提供三維可視化窗口,輕松實現關節點動、回原點、三維場景可視化與編輯等功能。

· 三維顯示桁架臂當前運動狀態數據,包括實時位置、幾何關系、障礙物等。
· 可視化場景編輯,用戶可在界面狀態欄中進行障礙物方位的修改、移除或添加,實現對桁架機器人的柔性控制。
· 支持同步更新,便于前期方案的驗證與部署過程中的調試,在實際生產運行時方便用戶進行直觀操作,快速應對柔性生產需求。
· 可視化場景編輯,用戶可在界面狀態欄中進行障礙物方位的修改、移除或添加,實現對桁架機器人的柔性控制。
· 支持同步更新,便于前期方案的驗證與部署過程中的調試,在實際生產運行時方便用戶進行直觀操作,快速應對柔性生產需求。
4.開發靈活,操作簡便
在使用SpeedTruss智能桁架控制器時,用戶只需在軟件中調用任務指令接口即可實現相應功能,無需進行額外的開發工作,輕松實現多臂桁架機器人的柔性運動控制。
·在線控制狀態下,系統實時監測桁架控制運行狀態,輕松控制桁架機器人多臂無碰運動。
·離線仿真模式支持虛擬場景構建,從而驗證方案設計階段桁架臂的可達性、數量等設計參數是否達標,實現入場前提前發現問題、解決問題,隨時隨地調試優化,可大幅縮短投產周期,實現快速交付。
SpeedTruss應用情況
SpeedTruss智能桁架控制器以功能強大、開發靈活、操作簡便等優勢在重工、物流等領域多家龍頭企業實現批量落地。相比傳統PLC,在實現復雜環境、復雜任務下多臂桁架協同運動、靈活作業的同時,使桁架整體作業效率提升了20%~35%,全方位推進工廠智能化升級以及降本增效。在重工制造業鋼板切割件分揀場景,來料零件重且規格多樣、作業空間跨距大、生產環境復雜,難點在于桁架高速重載運動以及多臂無碰協同作業的控制。國內多家重工龍頭企業生產線采用SpeedTruss智能桁架控制器進行多臂桁架的智能調度與協同作業,實時規劃最優運動軌跡,主動避障、多機無碰、高效作業,輕松完成了上萬種鋼板切割件的柔性揀選。


視比特機器人成立于2018年,是一家專注于AI機器視覺及工業智能軟件的高科技公司,致力成為工業智能賽道的持續開拓者與領航者。總部位于長沙,研發總部位于上海,在天津、寧波、貴陽、加拿大、塞爾維亞、捷克、東南亞等地設立了辦事處。
公司圍繞“軟件定義工業智能”,憑借自主研發的3D視覺算法、機器人柔性控制、手眼協同融合、多機器人協同、工廠級智能規劃與調度等核心技術,打造面向敏捷開發、可視測試、快速部署、持續運維的“數字孿生+云原生”工業智能軟件平臺,為客戶提供系統級軟硬件一體解決方案,加速各行業智能產線和智慧工廠的落地應用。
公司首創的重工業鋼板切割智能下料分揀產線已在多家龍頭企業規模落地應用;汽車行業大尺寸高精度在線測量專機系列打破國外長期壟斷,已成功交付全球多家汽車主機廠及零部件龍頭企業;物流行業動態分揀機器人在食品、電商、醫藥、快遞物流、倉儲物流等領域大面積交付使用,在行業中享有良好口碑。
成立以來,已完成6輪融資,天使輪由圖靈創投領投+道生資本跟投,戰略輪由同威資本領投,A輪由和玉資本領投,A+輪由中金資本領投,B輪3億元融資由經緯創投領投。同時,公司在科技創新、產業應用、社會貢獻方面受到各界關注和認可,已獲國家高新技術企業認定,榮摘國家科技部2021年度全國顛覆性技術創新大賽優秀項目、2021年科創中國新銳企業獎等眾多獎項。