AGV(Automated Guided Vehicle)以工業移動機器人的身份在國內應用發展超過25年了,從最初的引進技術,到現在的自主研發、行業壯大,甚至技術超越,經歷了“引進、消化、吸收、再創新”的全過程。近幾年,隨著國家“制造業高質量發展”和“智能制造”戰略的落實,AGV從幾乎不為人知的小眾產品成長為了具有一定規模的產業,各行業對AGV都呈現出了旺盛的需求。而更為欣喜的是,新概念、新技術、新人才、新實體不斷涌現,行業規范、行業細分也逐漸走上了正軌。近年來,行業中出現了AMR(Autonomous Mobile Robot)這一新概念,本文將從技術發展歷史及其技術特征來談談AGV與AMR。
1. 歷史沿革
AGV最早出現在上世紀50年代的美國,按照機器人的三大特征,即代替人進行工作;具有通用性;直接對外界作用,AGV隸屬機器人。由于最早的功能就是物料搬運,所以用了Vehicle(運載工具)這一英文單詞。在2003年前的一些文獻資料中,AGV的英文名詞其實也沒有完全統一,有稱其為Autonomous Ground Vehicle的、有稱其為Automatic Guided Vehicle或Autonomous Guided Vehicle的,甚至也有直接稱其為Unmanned Vehicle的。在國內的名稱也很雜亂,曾經出現“無人小車”、“無人搬運車”、“自動導引運輸車”等。
2011年,在全國物流倉儲標委會成立時,要求制定相關產品的國家標準,在結合了多位專家的建議后,最終將此類產品的中文名稱定義為“自動導引車”,英文名稱選用了Automated Guided Vehicle,即AGV。上世紀六十年代,為了突出與玩具及人形機器人的區別,把工業應用的機器人稱為工業機器人;二十多年前,為了突出與其他工業機器人的區別,又出現了一個比較學術的英文名詞——WMR(Wheeled Mobile Robot),即輪式移動機器人,其典型代表就是美國2003年的“勇氣號”火星車。這樣起來看,AGV就是“工業應用的輪式移動機器人”。最新國家標準的定義是:具備物料運輸或操作能力,以輪式移動為特征,基于環境標記物或外部引導信號,沿預設路線運動的自主移動設備。
AMR是Autonomous Mobile Robot的英文縮寫,即自主移動機器人。從字面上理解,AMR的范圍應該很廣,天上飛的無人機(UAV-Unmanned Aerial Vehicle),水中游的無人潛航器(UUV-Unmanned Underwater Vehicle 以及AUV-Autonomous Underwater Vehicle),也都應該屬于此類。但在移動機器人領域,AMR同樣是“工業應用的輪式移動機器人”。
2. AMR與AGV的區別
AMR與AGV的區別更多應該表現在“自主性(Autonomous)”上,但到目前為止,并沒有看到AMR的準確定義,看到的僅僅是一些國外市場研究機構關于AMR與AGV區別的描述,那些描述都無法給AMR定性。其中典型的表述:
AMRs, unlike AGVs use on-board navigation, rather than external markers for localization, typically AMRs use SLAM based navigation, but this is not always the case,——以SLAM導航為基礎,不需借助外部標記物,但也不都是這樣;
AGVs using SLAM navigation are normally referred to as AMRs, but as there are shades of grey, it has never been properly defined when a vehicle is an AGV or an AMR,——用SLAM導航的AGV通常就被稱為AMR,但不可能準確定義一輛車是什么時候是AGV、什么時候是AMR。
從這些表述中總結AMR的特征:第一SLAM導航;第二不需要外部標記物;第三不能完全肯定。其中都沒有提到AMR的“自主(Autonomous)”特征。什么是AMR呢?根據筆者的認知,“不需要外部標記”是必要特征,但如果SLAM僅僅用于導航定位,與別的導航算法(如NDT)作用是一樣的,因此,AMR的“自主”應該與導航算法無關,更多是關于“預設路徑”還是“非預設路徑”的問題,否則無法區別于被稱為“輪廓導航”、“環境導航”又或是“自然導航”的AGV,因為這些導航同樣“不需要外部標記”。再則,根據市場描述AMR非常重要的特征是:主動繞行障礙物。主動繞行的確是AMR計算的“非預設路徑”,但問題是“能夠主動繞行障礙物的自然導航AGV”就是AMR么?如果不是,AMR的“自主性”的范圍就值得商榷了!
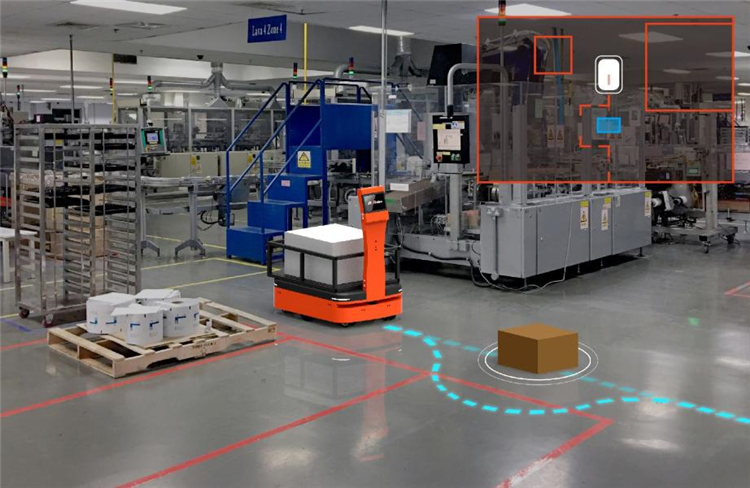
目前,自然導航AGV與AMR都須在已知的環境中運行,即事先構建并獲得運行環境的全局坐標,都必須知道自己的當前位置和目標點的位置;當目標點坐標確定后,在行駛路徑上,AMR運行有兩種模式:一種是AMR按事先規劃的預設路徑(地圖)運行,當在行駛路徑遇到障礙時,能夠繞行障礙。而目前自然導航AGV遇到障礙時停止,障礙物消失后延時自動運行或等待人工確認。另一種是AMR根據坐標信息或是尋找目標特征,動態規劃路徑,即非預設路徑,自主決定可行使的區域。而自然導航AGV是由上位系統或單機自身對預設路徑進行“搜索”,中獲取運行信息,并按預設路徑進行“導引(Guided)”或路徑跟蹤,一旦運行范圍超過安全區域(Safety zoon)即為故障。
如果AMR是第一種模式,那么“能夠主動繞行障礙物的自然導航AGV”就是AMR了,AMR與自然導航AGV也就沒有本質的區別,是部分功能(繞障)的增強,自然導航AGV可實現。
如果是第二種模式,AMR將可能具備很大的優越性。體現在交通管理方面,由于單機具備動態路徑規劃能力,當多臺AMR相遇時,能夠主動避讓,不會出現“死鎖”現象。而對AGV系統來說,單機必須按路徑行駛,無論是上位系統分配路徑還是單機申請路徑,都不可避免出現阻塞甚至“死鎖”現象。
這樣分析下來,AMR的主動性應該體現在:單機能夠即時動態規劃路徑。“非預設路徑”才是AMR唯一的標簽,也只有這個功能AGV才不具備,畢竟是經過“導引(Guided)”的,即使出現局部“盲導(Blind)”,也須運行在預設路徑上。
3. 可能產生的影響
1999年,美國MHI(Material Handling Industry)曾發布了一份關于AGV的公開技術資料,系統地描述了AGV的基礎知識,并總結了使用AGV的好處(Benefits)。雖然過去了20年,但其中關于AGV單機運行最重要的幾個特征(安全性、可預期性、可重復性等)仍然值得重視。我們簡單討論一下,在工業應用場合中“非預設路徑”的移動機器人可能產生的影響:
安全性(Safety)——在絕大多數工業應用場合中,出于安全的考慮,人員路徑、物流路徑被事先指定,也就限制了移動機器人對路徑的動態規劃功能,只能在被允許的區域內安全運行,超出該區域將被認為不安全;
可預期性(Predictability)——對于大多數工業應用需求,更希望移動機器人的任務可被預期,其中最重要的是任務執行時間可預期,“非預設”路徑增加了系統的復雜度,不可預測性增大;
可重復性(Repeatability)——AGV最初的基本用途就是在重復的路徑上搬運貨物。可重復、可再現也是工業應用的基本要求,與可預期性類似。“非預設”將使移動機器人運行路徑的重復概率大大降低。
筆者認為,目前國內運行的AMR系統大多數是局部的“非預設路徑”,在已實施的系統中,單機承載和尺寸都較小,靈活性較高,能夠主動避障繞行,體現出更先進的一面,但在實際的應用中,必須注重周圍環境(包括垂直方向)識別,以確保避障繞行時的安全;AGV按“預設路徑”運行,安全性及運行秩序相對可控,但也應汲取AMR的優點,使系統更加柔性化,可以想象,未來AGV系統也會出現區域性的開放,即在特定區域內沒有預設路徑限制,單機能夠自主行駛;在任務優化調度方面兩者使用技術是相通的;而交通管理方面,AGV系統的“潮汐”動態路徑,“十字路”編隊通過等技術也值得AMR系統借鑒。
4. 總結
為了突出自身特點,區別于傳統AGV,部分新興企業更愿意稱自己的產品為AMR。但行業內的傳統企業,在解釋不清AGV與AMR的區別時,只能繼續把自己的產品稱為AGV,與人的名字一樣,叫了一輩子的“張三”,突然改名會讓人感覺很奇怪。
就目前情況看來,AMR與“位置估算(Dead reckoning)”導航算法的AGV沒有本質的區別,只是部分功能的增減,應相互借鑒優點,無論是AGV或是AMR只是產品“代號”,應當理性認識、理性宣傳。
12月15-17日,由中國移動機器人(AGV/AMR)產業聯盟主辦的“2021 中國移動機器人(AGV/AMR)行業發展年會”將在北京舉行,敬請期待!CMR產業聯盟年會,是一年中最為重要的行業會議,會聊宏觀經濟的走勢,做到自上而下的研判;會討論投資策略,以及風險規避;會聊產業發生的趨勢變化、探討行業問題等。年會是打開視野、提升認知、抓基調、定主線的重要時刻。期待每一位與會嘉賓的真知灼見。